

1 / 5


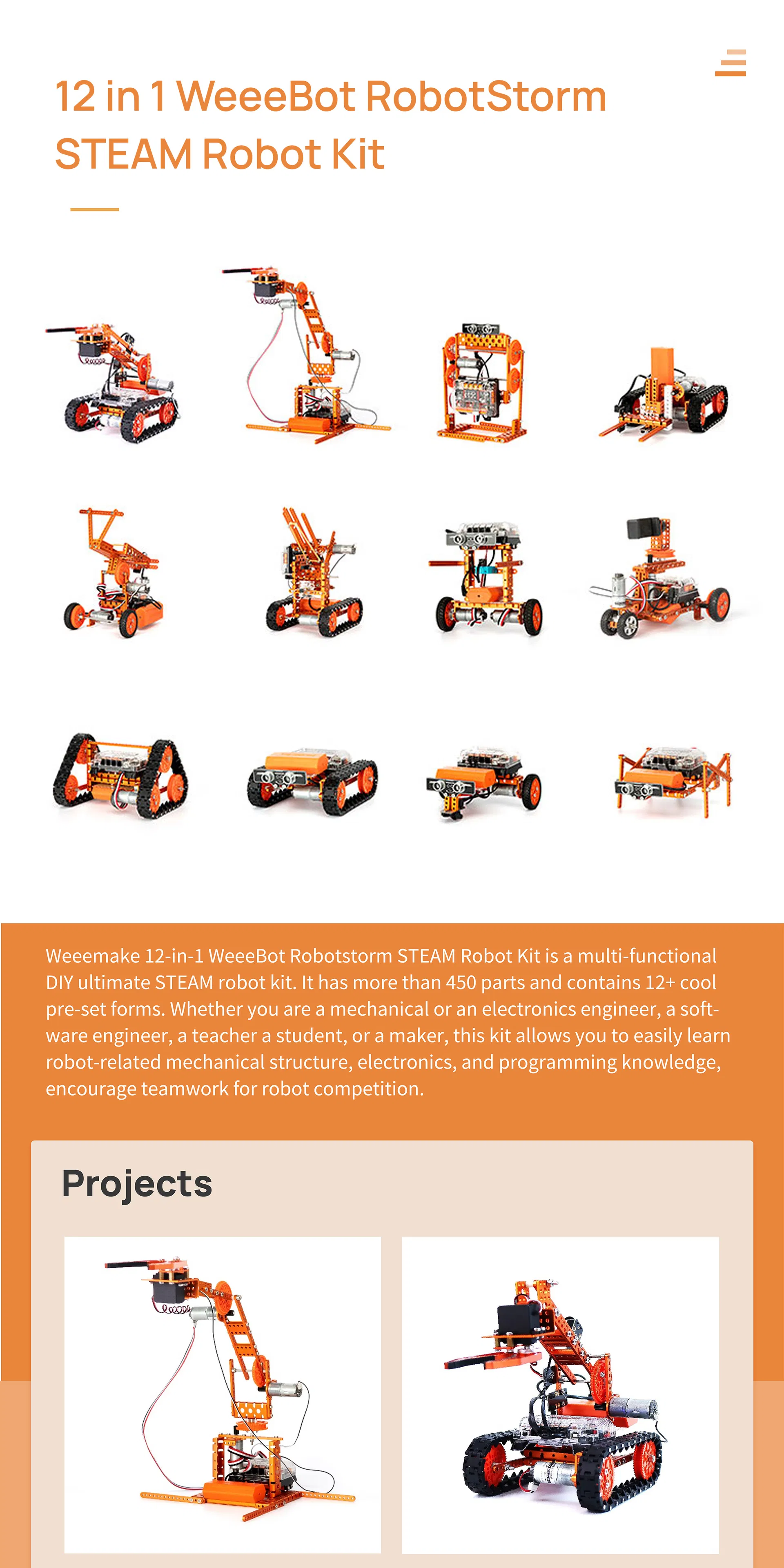
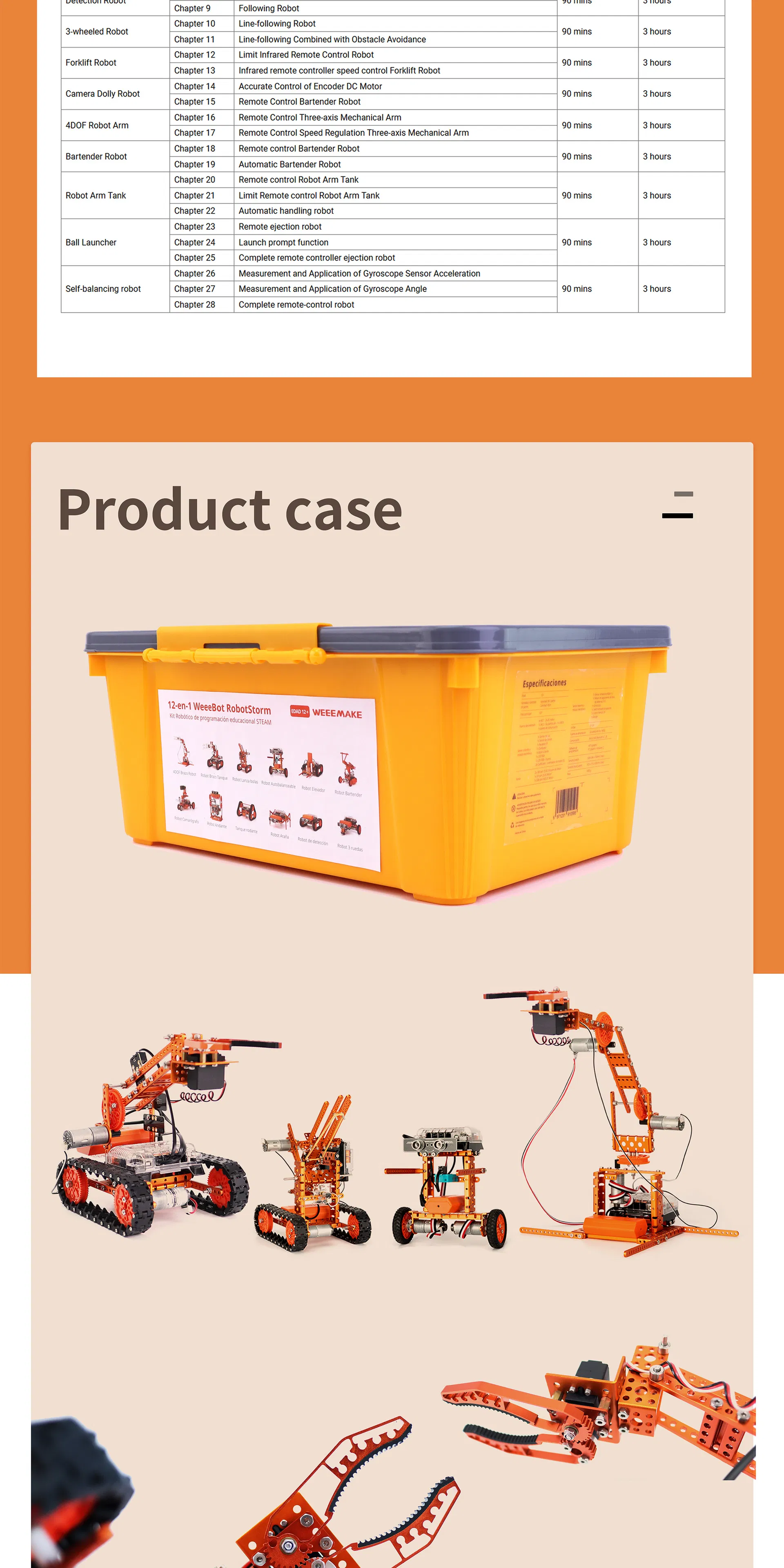
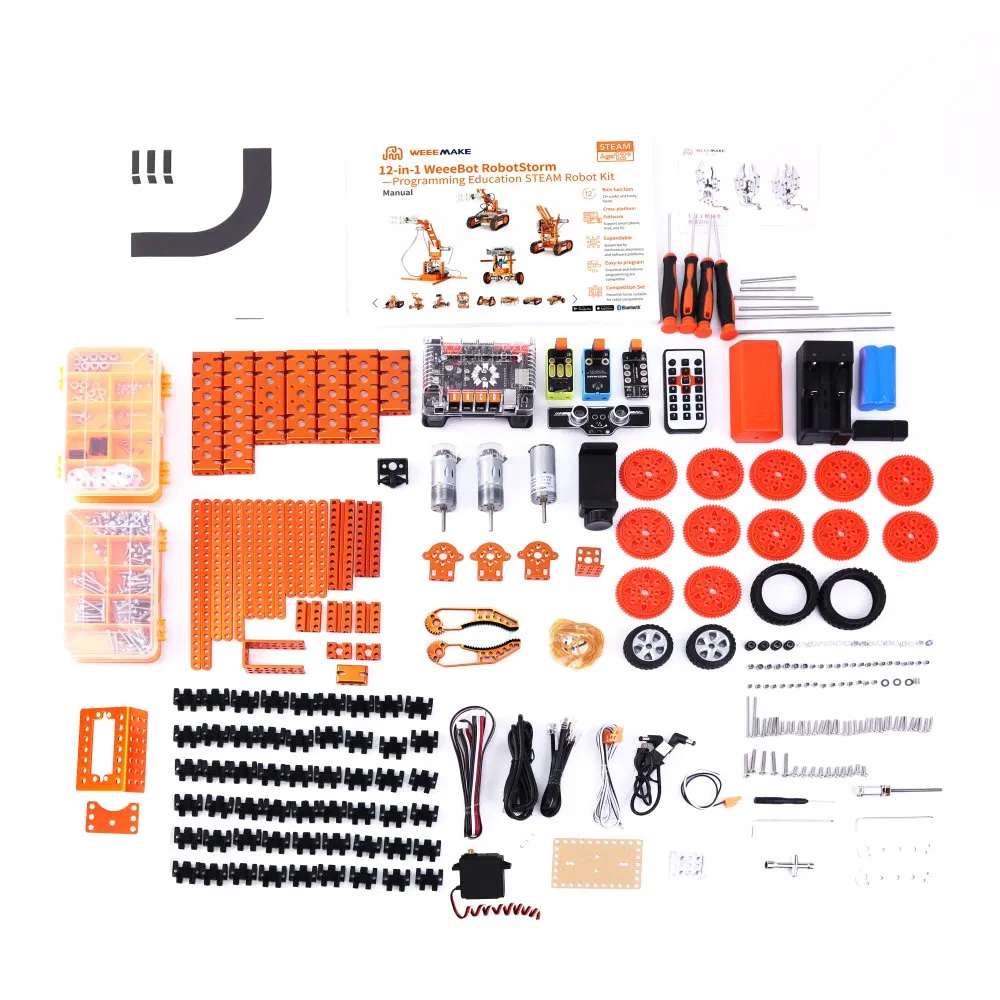
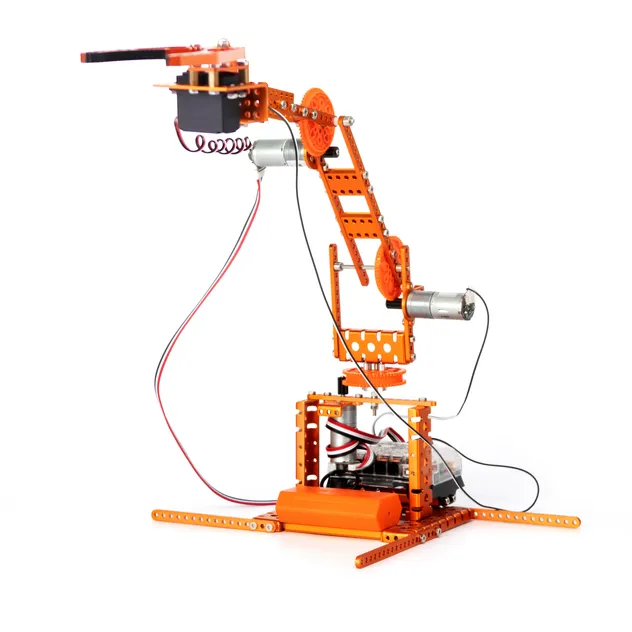
This 12-in-1 STEAM Robot Kit is a multi-functional DIY ultimate STEAM robot kit. It has more than 450 parts and contains 12+ cool pre-set forms. Whether you are a mechanical or an electronics engineer, a software engineer, a teacher, a student, or a maker, this kit allows you to easily learn robot-related mechanical structure, electronics, and programming knowledge, and encourages teamwork for robot competitions.
This kit is a powerful parts library consisting of more than 450 parts. With heavy-duty mechanical parts such as beams, plates, brackets, gears, grippers, tracks, shafts, wheels, and easy-to-use electronic modules like the mainboard, RGB ultrasonic sensor, Line-following sensor, gyroscope sensor, limit switch, RGB LED-8 module, light sensor, sound sensor, buzzer, IR receiver, Bluetooth module, and Bluetooth dongle, you can get an enhanced hands-on experience on 12 different robot setups programmable wirelessly.












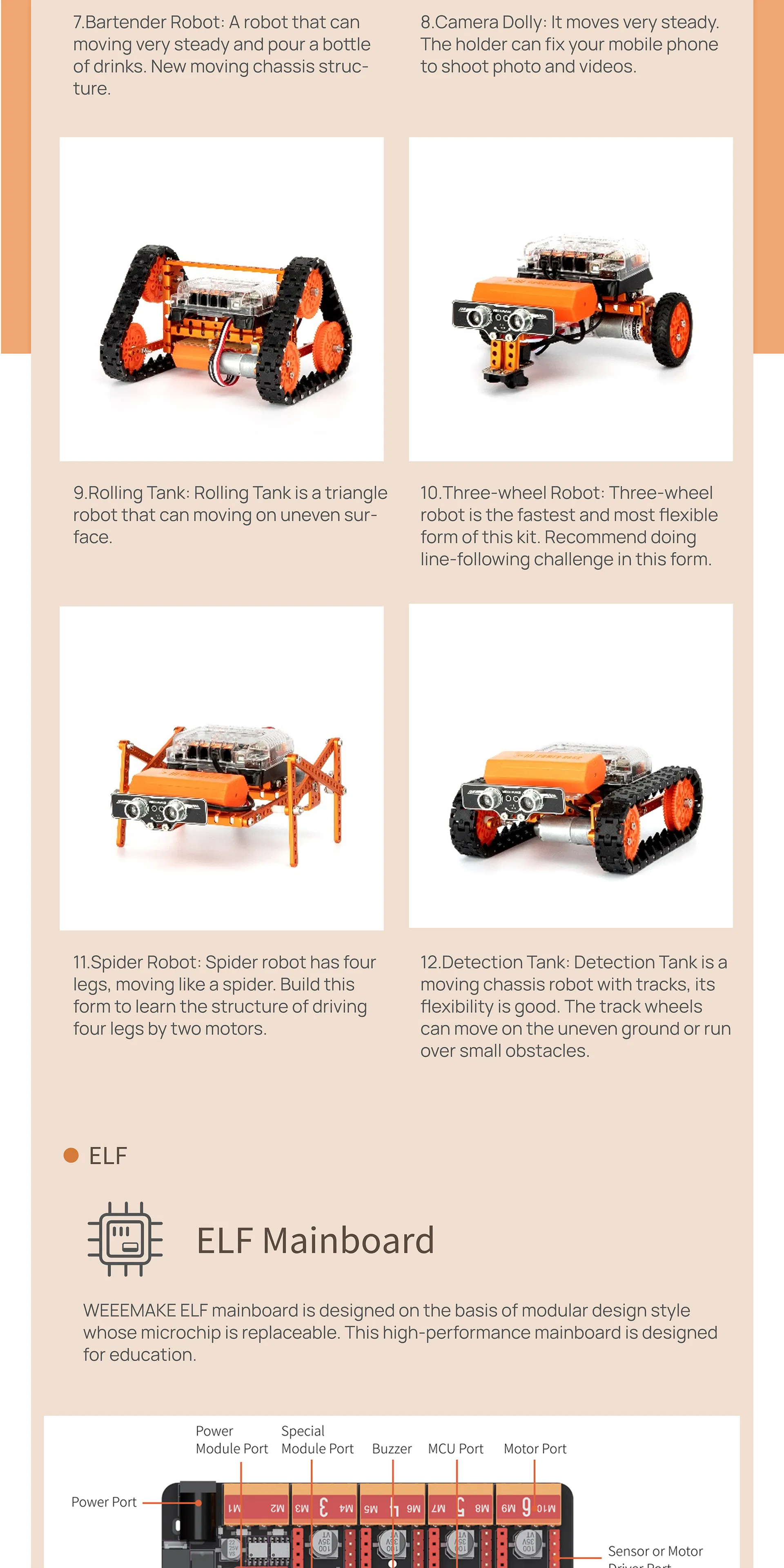
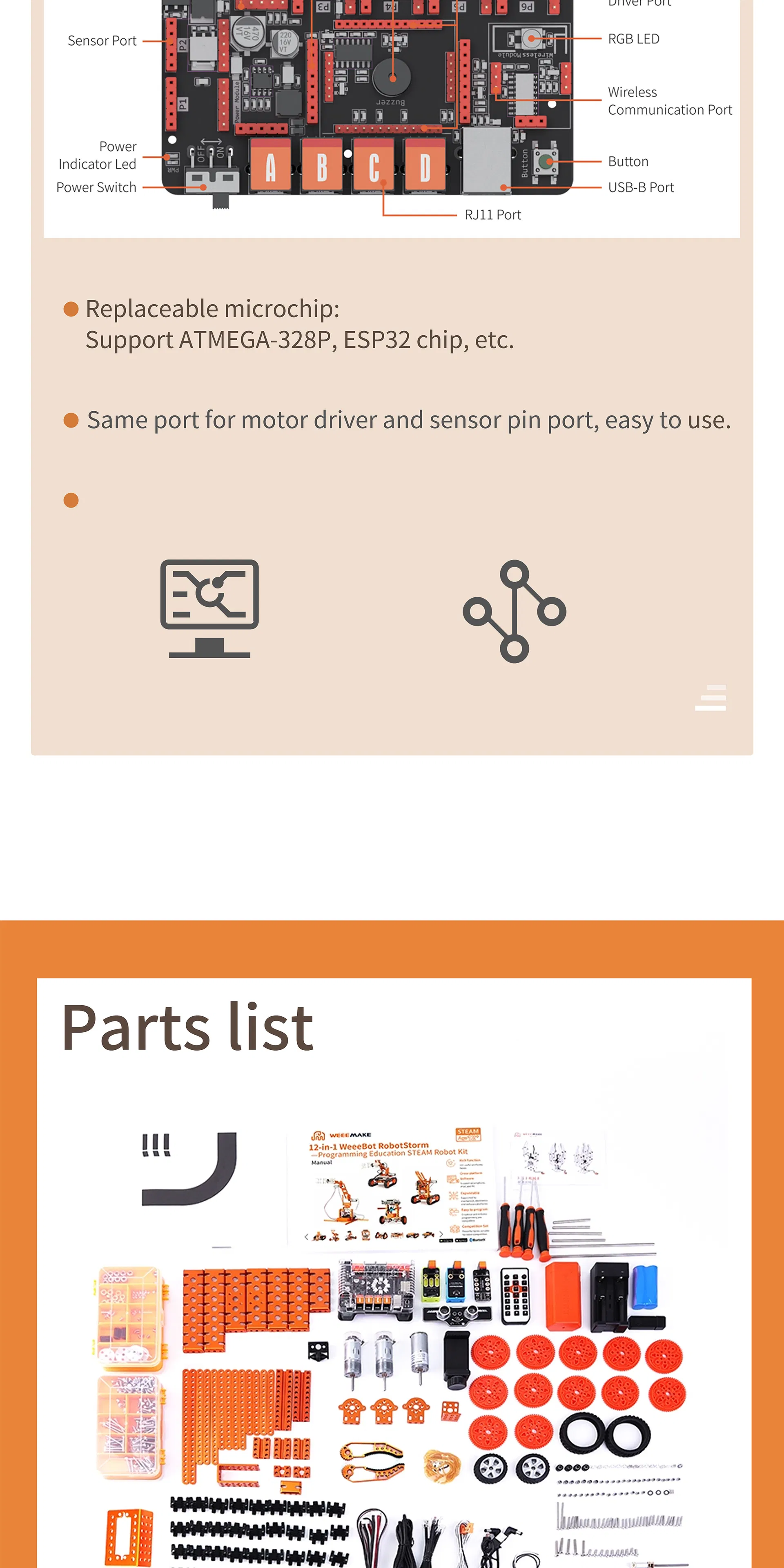
The ELF mainboard features a modular architecture with a replaceable microchip. This high-performance board is optimized for educational environments.
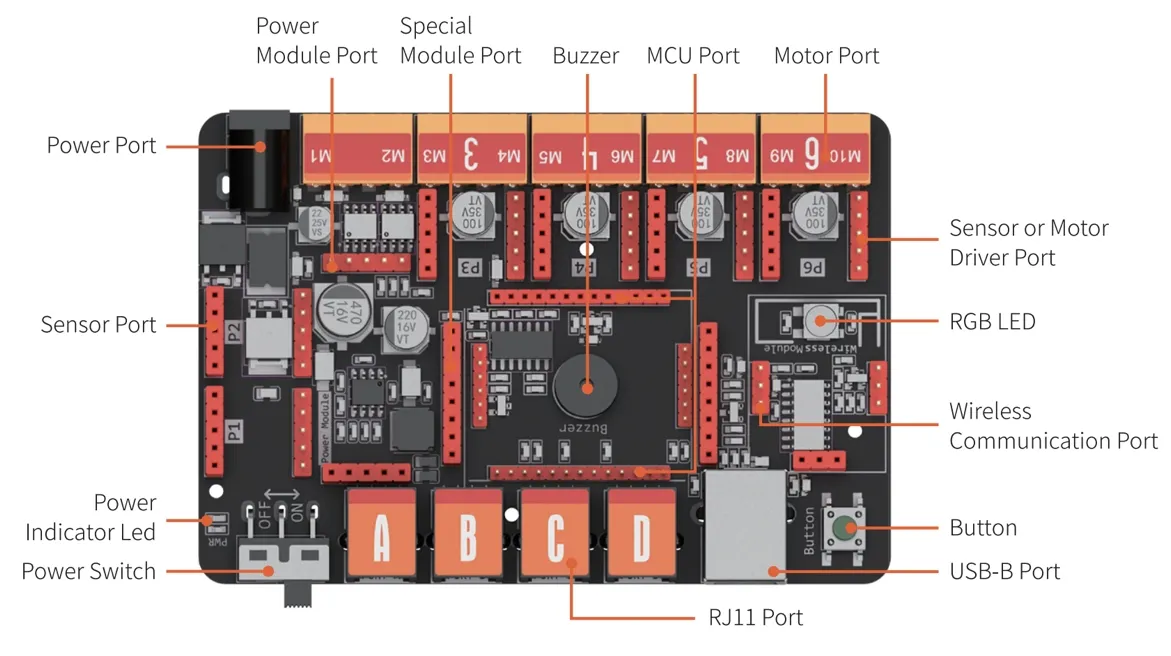
| Operation Voltage | 6-12V |
| Wiring Ports |
1x MCU port (ATmega 328p or ESP32) 4x RJ11 port 2x DC motor port 6x pin conversion port (4 of which can serve as stepper/encoder/DC motor ports) 1x Wireless Communication port (Bluetooth 2.4G) 1x USB port (type B) |
| Onboard Electronics |
1x Buzzer 1x Button 1x RGB LED |
| Software Support |
Graphical Programming Software (Scratch 3.0 base) Arduino IDE |